Neue Roboterfische organisieren sich selbst

Roboter nach dem Vorbild von Fischen haben Forscher der Ingenieurschule der Harvard University (SEAS) und des ebenfalls an der Hochschule angesiedelten Wyss Institute for Biological Inspired Engineering entwickelt. Genauer gesagt, brachten sie den künstlichen Tieren bei, sich im Schwarm zu bewegen, so wie es viele Fische tun. So irritieren sie Fressfeinde, finden leichter Nahrung und sparen Energie.
Roboter werden häufig in Bereichen eingesetzt, die für Menschen unzugänglich oder gefährlich sind, in denen möglicherweise nicht einmal ein menschliches Eingreifen möglich ist, so Florian Berlinger, Doktorand bei SEAS und Wyss. In diesen Situationen ist es wirklich von Vorteil, einen Roboterschwarm zu haben, der autark agiert. Durch implizite Regeln und visuelle 3D-Wahrnehmung konnten wir ein System schaffen, das unter Wasser ein hohes Maß an Autonomie und Flexibilität aufweist, wo Dinge wie GPS und WiFi nicht zugänglich sind.
Der Roboterschwarm, auch Blueswarm genannt, wurde im Labor von Radhika Nagpal, Professor für Informatik an der SEAS und assoziiertes Fakultätsmitglied am Wyss Institute, hergestellt. Nagpal ist ein Pionier in selbstorganisierenden Systemen. Blueswarm ist nicht die erste Robotertruppe, die im Schwarm agiert. Bisher waren diese auf zwei Dimensionen begrenzt. Nagpal erweiterte das auf eine Schwarmbildung im dreidimensionalen Raum. Die neuen Roboter bewegen sich in der Luft oder im Wasser, nicht nur auf einer Fläche, etwa dem Erdboden.
Zwei Kameras, drei Dioden
Jeder Unterwasserroboter, auch Bluebot genannt, ist mit zwei Kameras und drei LEDs ausgestattet. Die eingebauten Fischaugenkameras erkennen die LEDs benachbarter Bluebots und verwenden einen benutzerdefinierten Algorithmus, um deren Entfernung und Richtung zu bestimmen. Basierend auf der einfachen Erzeugung und Detektion von LED-Licht haben die Forscher gezeigt, dass der Blueswarm komplexe selbstorganisierte Verhaltensweisen aufweist, einschließlich Kreisbildung.
Die Forscher haben die Bluebots auch auf die Suche geschickt. Dazu positionierten sie im Wasser eine rote LED. Die Roboter schwärmten aus, bis einer von ihnen das Ziel entdeckte. Das ließ seine blauen LEDs blinken. Dies löste den Aggregationsalgorithmus aus, der alle Bluebots anlockte, sodass sie sich im Schwarm um das Ziel versammelten. (pte)
Aktuelle Onlineartikel
-

19. 02. 2026 Biobasierte Fasern mit gutem Flammschutz
-

19. 02. 2026 Beton als CO₂-Senke
-

18. 02. 2026 Biobasierter Hochleistungskunststoff für die Elektroindustrie
-
18. 02. 2026 Laufzeitrekord und erste Stromerzeugung mit kompressorloser Wasserstoffgasturbine
-
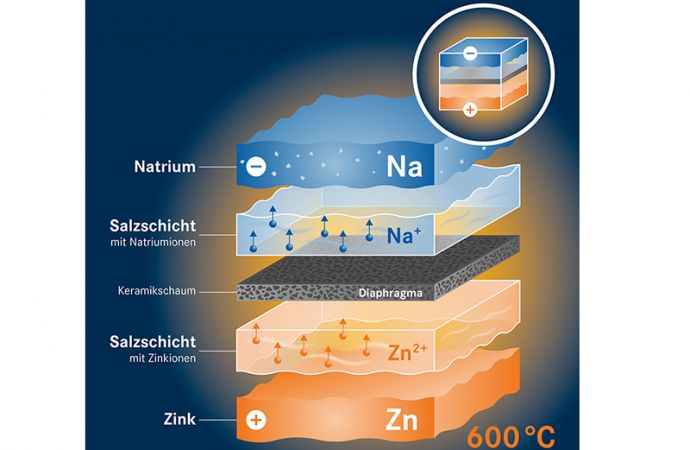
17. 02. 2026 Blick durch die Röntgenbrille –Alterungsprozesse in Natrium-Zink-Salzschmelzbatterien entschlüsselt
-

28. 01. 2026 Wolfram: Dual-Use als Waffe im Rohstoffkrieg